| Cím: | A gravitációs többtestprobléma két speciális esetre | ||
| Szerző(k): | Woynarovich Ferenc | ||
| Füzet: | 2015/december, 558 - 563. oldal |  PDF | MathML PDF | MathML |
|
| Témakör(ök): | Szakmai cikkek, Pontrendszerek mozgásegyenletei, Newton-féle gravitációs erő | ||
|
A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre. Amint az jól ismert, egy centrális gravitációs térben egy tömegű testre (amit nevezzünk bolygónak)
Az (1) egyenlet megoldása ellipszis, parabola vagy hiperbola attól függően, hogy a mozgó test teljes
A következőkben két olyan esetet tárgyalunk meg részletesen, amelyekben ezek a feltételek nem teljesülnek: megvizsgáljuk, hogyan mozog két közel azonos tömegű égitest (ikercsillag) egymás gravitációs terében, és bemutatjuk a gravitációs háromtest-probléma egy igen speciális, de nagyon szép esetét. Tegyük fel, hogy a két égitestre egymáson kívül nem hat semmi! Ekkor nyilván a közös tömegközéppont körül mozognak, ezért érdemes a koordináta-rendszerünk origóját ehhez a ponthoz rögzíteni. Ez az impulzusmegmaradás miatt inerciarendszer. Legyen a két tömeg és , a helyvektorok pedig és ! A koordináta-rendszer választásunkból következik, hogy a mozgás során minden pillanatban Ebben a koordináta-rendszerben tehát csak olyan kezdeti feltételnek van értelme, amely a fenti egyenleteknek megfelel, és tulajdonképpen csak egy független koordinátánk van. Mivel az erőtörvényben a két test távolsága szerepel, független változónak érdemes pl. az vektort választani (). Ennek segítségével a két mozgásegyenlet Most tekintsünk három, minden más objektumtól függetlennek tekinthető égitestet! A tömegek legyenek , és , és a koordináta-rendszerünk origójának válasszuk most is a közös tömegközéppontot. Az koordináták és az sebességek () most az
Mi következik ebből? Nevezetesen az, hogy ha egy pillanatban mindhárom test sebessége ugyanúgy arányos a helyvektorával, azaz
A (7) és (1) egyenletek azonos alakja, és a háromszög arányainak változatlansága alapján állíthatjuk, hogy a három test egymáshoz hasonló kúpszeletpályákon mozog a közös tömegközéppont körül. Ugyan mindegyik más-más effektív centrális tömeget ,,lát'', de éppen ez biztosítja a pályák időbeli szinkronját. Ezzel összhangban ellipszispálya esetén bármelyik test keringési idejére ugyanaz adódik: Végezetül szólnunk kell a pálya alakját meghatározó feltételről. Senki nem lepődik meg azon, hogy azt most is az
Megjegyzések. 1. A cikkben tárgyalt problémák tartalmazzák egymást mint határesetet. Az ikercsillagnál minél nagyobb az egyik csillag tömege a másikénál, annál jobban megközelíti a rendszer a rögzített centrum esetét. Hasonlóan, ha a három test közül az egyik tömege lényegesen kisebb, mint a másik kettőé, az a kettő úgy mozog, mint ahogy azt az ikercsillagoknál látjuk. 2. Az ikercsillagok problémája a gravitációs kéttestprobléma általános esete, és a pályák a tömegközépponti rendszerben mindig kúpszeletek. Ezzel szemben a háromtest-probléma általános esete igen bonyolult, nem periodikus, és általában nem is síkmozgás: a három test síkja időben elfordulhat. Az itt tárgyalt eset csak nagyon speciális kezdeti feltételek mellett valósulhat meg, és attól különleges, hogy a testek távolságainak az aránya, így az általuk kitűzött síkidom alakja nem változik a mozgás során. A háromtest-problémának van egy másik olyan megoldáscsaládja is, melyben a távolságok aránya nem változik: a három test háromféle módon is elhelyezhető úgy egy egyenesen, hogy azok egy (5)-nek megfelelő kezdeti sebesség esetén egymással szinkronban, végig egy egyenesen maradva kúpszelet pályán mozogjanak. (Ezek az esetek paraméteresen sajnos nem, csak numerikusan tárgyalhatók.) Így ha két test (mondjuk a két nagyobb) pozícióját és a mozgásuk síkját megadjuk, a harmadik test öt olyan pozícióba helyezhető, melyekben szinkronizált mozgás lehetséges. Ebből három a két (nehezebb) test egyenesére esik (egyik helyzet a két test között, egy-egy pedig a két testen kívül), kettő pedig a fentebb tárgyaltaknak megfelelően az a két pont, amely ugyanolyan távol van az egyes testektől, mint azok egymástól. Abban az esetben, ha a legkisebb tömeg elhanyagolhatóan kicsiny a két nagyobb tömeghez képest, ezt az öt pontot egyik tanulmányozójukról2 a rendszer Lagrange-pontjainak nevezik. Érdekes még, hogy a nagy testek egyenesébe eső Lagrange-pontok instabilak, az oda helyezett objektumok bármilyen kicsi zavar esetén gyorsulva kimozdulnak, míg a másik két pont (a nehéz testek tömegarányának nagyságától függően) lehet stabil abban az értelemben, hogy az oda helyezett harmadik, kicsiny tömegű test a zavaró hatások ellenére is hosszú ideig az adott pont közelében marad. Ezzel függ össze, hogy a Naprendszerben kisbolygók és aszteroidák egész felhői találhatók a Nap-Jupiter rendszer megfelelő (a Jupitert -kal megelőző, illetve követő) Lagrange-pontjainak a környékén, de találhatók kisbolygók a Neptunusz, a Mars és a Föld pályájához tartozó stabil Lagrange-pontok közelében is.3 Vegyük észre, hogy ha (9)-et beszorozzuk az
akkor igazoljuk, hogy (F3) a mozgási energia, tehát (F1) valóban a teljes energia. Márpedig (F4) fennáll, ahogy azt a mellékelt ábra segítségével könnyen beláthatjuk. 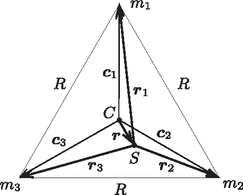 Ezen a háromszög oldala , a geometriai súlypontja , a fizikai tömegközéppontja , a -ből az -be mutató vektor , a -ből és az -ből az egyes tömegekhez mutató vektorok és . Az (F4) egyenlet jobb oldala a rendszer -re vonatkoztatott tehetetlenségi nyomatéka, amit a Steiner-tétel segítségével összeköthetünk a jól számítható -re vonatkoztatott tehetetlenségi nyomatékkal. Eszerint
1A cikkben azt a gyakorlatot követjük, hogy egy vektort és annak nagyságát ugyanaz a szimbólum jelöli, csak a vektort magát félkövér karakterrel szedjük; így pl. az vektor nagysága. Egy mennyiség jele fölé tett pont a mennyiség időbeli változásának ütemét jelzi, így a tömegpont sebessége, pedig a gyorsulása.2Joseph-Louis Lagrange (1736‐1813) olasz születésű francia matematikus és fizikus, aki többek között a számelméletben, a matematikai analízisben és az égitestek mechanikájában ért el nagyon jelentős eredményeket. 3A Naprendszer különböző bolygóihoz tartozó Lagrange-pontok közelében elhelyezkedő természetes és mesterséges égitestek impozáns listája található a https://en.wikipedia.org/wiki/List_of_objects_at_Lagrangian_points webhelyen. |