|
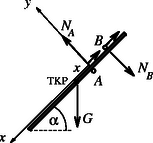
A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre. A léc elengedés után elkezd kicsúszni a két szög közül, mert . Az 1. ábra a lécre ható erőket ábrázolja. Érdemes a léc mozgását az ábrán látható (a szögek által meghatározott irányítású) koordinátarendszerben nyomon követni. Legyen a tömegközéppont (TKP) origóból mért változó távolsága . A TKP mozgásegyenletei: | |
A léc nem forog, így a tömegközéppontjára nézve az erők forgatónyomatékainak összege nulla. (2) és (3) alapján | | (4) |
és innen (1) felhasználásával | |
Ez egy alakú egyenlet, amely az koordinátájú pont körüli harmonikus rezgőmozgás egyenlete.
a) A léc tehát harmonikus rezgőmozgást végez az | | (5) |
koordinátájú pont körül körfrekvenciával. Kezdetben a léc TKP-ja az pontnál van, és a léc áll ( és ), vagyis a TKP a harmonikus rezgőmozgás egy szélső helyzetéből indul. Így a rezgőmozgás amplitudója (5) szerint: Amikor a léc TKP-ja egy fél periódus után egy másik szélső helyzetbe kerül, megáll a léc, és nem indul el felfelé (a súrlódási erők nem húzzák fel a lécet újra). A léc TKP-ja a 2. ábra szerint mozog. Megállásig a megtett út (7) szerint: cm. Megálláskor a léc a 3. ábrán vázolt helyzetbe kerül. Látható, hogy ekkor a szög felett még 10 cm hossz kilóg, tehát a léc nem tud kicsúszni a szögek közül, hanem beszorul.
b) A léc legnagyobb sebességét elindulás után egy negyed periódus múlva éri el, amikor átmegy a rezgőmozgás egyensúlyi pontján (tehát az cm koordinátájú ponton). Ekkor sebessége (6) és (7) alapján:
c) A léc mozgásideje a fentiek szerint a harmonikus rezgőmozgás fél periódusa, (6) alapján:
| Pólik Imre (Pannonhalma, Bencés Gimn., III. o.t.) dolgozata alapján |
|
 PDF |
PDF |