| Feladat: | 1463. fizika feladat | Korcsoport: 16-17 | Nehézségi fok: nehéz |
| Megoldó(k): | Czuczor Lajos , Frankhauser József , Kilián Imre , Kriza György , Sas Viktor | ||
| Füzet: | 1978/május, 227 - 231. oldal |  PDF | MathML PDF | MathML |
|
| Témakör(ök): | Tapadó súrlódás, Csúszó súrlódás, Egyéb merev test térbeli mozgása, Feladat | ||
| Hivatkozás(ok): | Feladatok: 1977/november: 1463. fizika feladat | ||
A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre.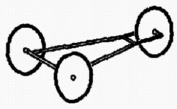 Készítsünk felülnézeti rajzot a kerékpár egy általános helyzetéről (1. ábra; a kerékpár síkjának a függőlegestől való eltérését, valamint azokat a hatásokat, amelyek a súlypont és az alátámasztási pontok magasságkülönbségéből adódnak, most és a továbbiakban mindig elhanyagoljuk). Egyenes vonalú mozgás esetén az első kerék vetülete és a kerékpár hossztengelye közötti szög nulla, és a tömegközéppont sebessége is a hossztengely irányába mutat (). Az a normális kormányzásnak felel meg, , pedig akkor lehetséges, ha a hátsó kerék csúszik. 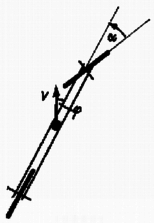 1. ábra A feladat modell járműve olyan esetet jelképez, amely egyenesen tartott kormánynak felel meg. A fékezés kezdetekor a kocsi egyenes vonalon mozgott, tehát a fékezés megkezdését követő pillanatban is. A kocsira ható erők felrajzolásához a következőket kell tudni: 1. Gördülő és szabadon forgó kerék esetén a kerék és a talaj közötti súrlódási erő jó közelítéssel merőleges a kerék síkjára. (A közelítés feltétele: , ahol a kerék tehetetlenségi nyomatéka, a kerék sugara, pedig az egész jármű tömege. A bizonyításnál azt kell felhasználni, hogy a súrlódási erő párhuzamos komponense a kerék nagy szöggyorsulását okozná, ami nincs összhangban a gördülés feltételével.) 2. Teljesen befékezett kerekekre csúszó súrlódási erő hat, ami ellentétes irányú a relatív elmozdulással. Az erő nagysága
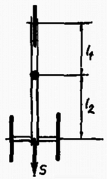 2. ábra Az elmondottakból egyszerűen következik, hogy a kerékpár a fékezés megkezdése után egyenes vonalú pályán egyenletesen lassulni fog, mert 1. alapján az első kerékre nem hat súrlódási erő (ha a kerék síkjára merőleges súrlódási erő nullától különbözne, akkor megbontaná a szimmetriát), 2. alapján pedig a hátsó kerékre a tömegközéppont sebességével ellentétes irányú erő hat (2. ábra). A tömegközéppontra vonatkozó forgatónyomaték is nulla. Lehetséges azonban, hogy a valóságban mégsem ez történik. Ennek oka, hogy a járművet mindig érik oldalirányú erőhatások, amelyek az egyenes pályától egy kicsit eltérítik, és előfordulhat, hogy egy ilyen oldallökés után nem az eredeti egyenes vonalú mozgás áll vissza, hanem egy bonyolult, csúszó, forgó mozgás. 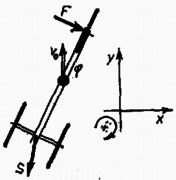 3. ábra A probléma részletes vizsgálatához válasszunk egy olyan koordinátarendszert, amelynek -tengelye a jármű eredeti mozgásának irányába mutat (3. ábra). Tételezzük fel, hogy a lökés a jármű sebességét alig változtatta meg, ezért a tömegközéppont sebességének komponenseire igaz a feltétel, ahol a jármű sebessége a lökés előtt. A jármű mozgásában keletkezett zavar egyértelműen jellemezhető a kocsi hossztengelyének és a koordinátarendszer -tengelyének szögével (ez a szög a (3) feltétel miatt megegyezik az 1. ábrán definiált szöggel), továbbá a jármű függőleges tengely körüli forgásának szögsebességével. A feladat a (3) közelítés nélkül és tetszőleges , mellett is megoldható, de matematikailag nagyon bonyolult és nehezen áttekinthető. A mozgás jellemzésére szerencsére elég azt vizsgálni, amikor a
A 3. ábrán felrajzoltuk a kocsira ható erőket is. Az 1. miatt az súrlódási erő merőleges az első kerék síkjára. A hátsó kerekeknél fellépő súrlódási erő nagyságát az (1) egyenlet adja meg, és irányáról egyelőre semmit sem tudunk. Feltételezzük, hogy a súrlódási erővektor vetületei a , koordináta irányokba mutatnak, de a későbbiekben ezt ellenőrizni kell. A mozgásegyenletek: E három egyenlet felírásával még nem vettük figyelembe, hogy az első kerék gördülése miatt a szöggyorsulás és a tömegközéppont gyorsulása nem független. Meg kell még határozni az súrlódási erő irányát is. Az első és hátsó kerék elmozdulását leírhatjuk a tömegközéppont elmozdulása és a tömegközéppont körüli elfordulás összegeként. A tömegközéppont elmozdulásának a kocsi hossztengelyére merőleges vetülete
A hátsó kerék elmozdulásának merőleges és párhuzamos vetülete: Az (5), (6), (7) mozgásegyenletek, a (11) kényszerfeltétel és a (12), (13) egyenletek a jármű mozgását már teljesen meghatározzák. A további számításokhoz használjuk fel a (2), (3) és (4) feltételeket! A (11) egyenlet közelítő alakja
A (12) és (13) egyenlet a hátsó kerék elmozdulását nem az ‐ koordináta-rendszerben adja meg, hanem az ezzel majdnem egybeeső ,,merőleges'', ,,párhuzamos'' koordináta-rendszerben. Kis esetén a hátsó kerék elmozdulása Látható, hogy a kitéréssel arányos kis mennyiség, . A súrlódási erő komponenseire az közelítő formula érvényes. ( negatív előjele mutatja, hogy ez a vetület ‐ korábbi feltevésünkkel szemben ‐ a pozitív -tengely irányába mutat.) A mozgásegyenletek közelítő alakja
Ebből az eredményből levonható első és legfontosabb következtetésünk: a szöggyorsulás előjele a kocsi jellemzőitől és sebességétől, valamint a súrlódási erő nagyságától függően megegyezik vagy ellentétes a szögeltérés előjelével. Ha a sebesség a
Felmerül a kérdés, mi okozza a jármű oldalra fordulási hajlamát nagy sebességek esetén? A 3. ábrából látható, hogy a pozitív szöggyorsulást az erő hozza létre, ha tehát a kormány mozgatásával ( az 1. ábrán) az erőt változtatjuk, akkor a járművet stabilizálhatjuk. A mozgás természetes stabilizáló ereje a hátsó keréknél fellépő súrlódás. Ha a súrlódási erő az (1) összefüggés szerint függ -től és től, akkor a kritikus sebesség
A valóságban a gumifelület és az aszfalt közötti csúszó súrlódás nem arányos a nyomóerővel, és a sebességtől is függ. Nagyobb nyomóerő esetén a számított -nél kisebb súrlódást kapunk, ezért kedvezőbb, ha a jármű súlypontja az első kerékhez közelebb van (kis a (28) kifejezésben). |