| Cím: | Konvex poliéderek egyensúlyi pontjai | |
| Szerző(k): | Domokos Gábor , Kovács Flórián , Lángi Zsolt , Regős Krisztina , Varga Péter Tamás | |
| Füzet: | 2020/május, 264 - 273. oldal |  PDF | MathML PDF | MathML |
|
A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre. Jelen folyóirat egy korábbi számában megjelent cikkben [5] vízszintes síkra helyezett, saját tömeggel rendelkező konvex poliéderek stabil egyensúlyi helyzeteire vonatkozó eredményeket ismerhettünk meg. Ezen cikkben, az egyensúlyi pont fogalmának ismertetése után, többek között két állítás bizonyítását olvashatjuk:
Érdemes megjegyezni, hogy az első állítás megtalálható, mint a Gnädig Péter, Honyek Gyula és Vígh Máté szerkesztette, 333 furfangos feladat fizikából című feladatgyűjtemény F. 120-as feladata [4]. Az említett [5] cikk végén a szerző négy kérdést fogalmaz meg konvex poliéderek egyensúlyi pontjaira vonatkozóan. Ezek közül az első három kérdés stabil egyensúlyi pontokra vonatkozik, és a cikkben megtalálhatjuk a felvetett problémákkal kapcsolatos ismereteink összefoglalását is. Jelen írásunkban többek között azzal a (negyedikként közölt) kérdéssel kívánunk részletesen foglalkozni, amely csúcsán ‐ tehát nem stabil módon ‐ egyensúlyozott tetraéderre vonatkozik: Ez a megfogalmazás a hivatkozott cikk első kérdésének ,,duálisaként'' is felfogható. A kérdés logikáját követve természetes módon adódnak a cikk végén feltüntetett kérdések csúcsokra vonatkozó változatai is, mint például a következő: A kérdést továbbgondolva egy általánosabb kérdéshez is eljuthatunk: Cikkünk fő témája a 3. kérdés precízebb megfogalmazása, illetve a vele kapcsolatos ismereteink összefoglalása. Ehhez viszont definiálnunk kell a konvex poliéderek egyensúlyi pontjainak különböző típusait, illetve a konvex poliéderek ezekkel kapcsolatos osztályozási rendszerét. Első lépésben talán nem árt felidéznünk egy konvex test egyensúlyi pontjának fogalmát [5]. Érdemes meggondolni, hogy minden belső pontja lehet tömegközéppontja alkalmas inhomogén sűrűséget feltételezve, valamint azt, hogy ha a test egy egyensúlyi pontja -re nézve, akkor -t alátámasztva -ban egy vízszintes síkkal úgy, hogy ne billenjen el, pontosan felett fog elhelyezkedni. A továbbiakban nem csupán stabil egyensúlyi pontokkal foglalkozunk, így érdemes azzal folytatnunk, hogy az egyensúlyi pontok szóba jöhető típusait ‐ akár homogén, akár inhomogén sűrűségeloszlást feltételezve ‐ definiáljuk. Képzeljük el, hogy az egyensúlyi pontban alátámasztott testet kicsit kibillentjük az egyensúlyi helyzetéből. Előfordulhat, hogy ezt bármilyen irányban megcsinálva a test visszabillen az egyensúlyi helyzet felé, vagy éppen ellenkezőleg, tovább billen, és távolodik az egyensúlyi helyzettől. Előfordulhat az is, hogy a billentés irányától függően a test időnként vissza-, időnként pedig tovább billen az egyensúlyi helyzethez képest. Ezekben az esetekben az egyensúlyi helyzetet rendre stabil, instabil, vagy nyereg típusú egyensúlyi helyzetnek hívjuk. Ezekre példa egy kocka lapközéppontja, csúcsai, illetve élközéppontjai. A precíz matematikai megfogalmazáshoz az alábbi definíciót adjuk.
Meggondolható, hogy határának a súlyponthoz legközelebbi pontja mindig stabil, a legtávolabbi pontja pedig mindig instabil egyensúlyi pont, tehát -nek mindig van legalább egy stabil, és legalább egy instabil pontja. A matematikai analízis egyik híres tételéből, a Poincaré‐Hopf-tételből [1] következik, hogy ha egy konvex poliédernek csak nemdegenerált egyensúlyi pontjai vannak, akkor a stabil pontok , instabil pontok és a nyeregpontok száma kielégíti az 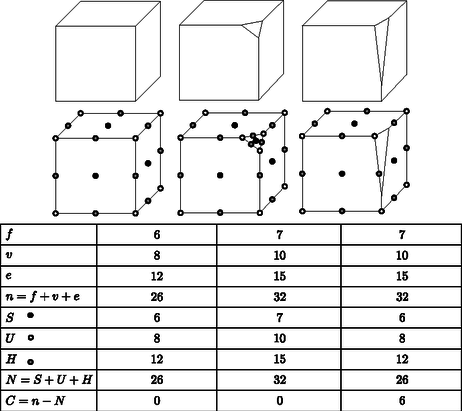 A cikk további részében csak olyan konvex poliéderekkel foglalkozunk, melyeknek nincsenek degenerált egyensúlyi pontjai. Ahogy a bevezetőben említettük, ,,nemdegenerált'' esetben, azaz ha a poliéder minden egyensúlyi pontja stabil, instabil, vagy nyeregpont, akkor ezek , és száma kielégíti az összefüggést. Így a fenti adatok közül pl. és értéke meghatározza értékét is. A továbbiakban -vel fogjuk jelölni az stabil és instabil egyensúlyi ponttal rendelkező konvex poliéderek családját. Hasonlóan, az Euler-tétel szerint minden konvex poliéder lapszáma, élszáma és csúcsszáma kielégíti az összefüggést. Ennek alapján az lapú és csúcsú konvex poliéderek családját -val fogjuk jelölni. Ezen osztályokat rendre a poliéder egyensúlyi, illetve kombinatorikus osztályának nevezzük. Említettük, hogy tetszőleges konvex poliédernek van legalább egy stabil és legalább egy instabil pontja, azaz tetszőleges osztályban . Hasonlóan, minden konvex poliédernek van legalább lapja és csúcsa, azaz minden osztályban . Erről az osztályozási rendszerről többet is tudunk. Steinitz egy tétele [6] szerint pontosan akkor van lapú és csúcsú konvex poliéder, ha
A cikkünkben tárgyalt fő fogalom az alábbi. Vegyük észre, hogy a poliéder minden lapja, csúcsa és éle legfeljebb egy egyensúlyi pontot tartalmaz. Tehát ha és , akkor és , amiből a is következik a nyeregpontok és az élek számára. Így komplexitása nem lehet negatív. Másképp megfogalmazva, komplexitása azon lapjainak, éleinek és csúcsainak száma, melyek nem tartalmaznak egyensúlyi pontot, azaz pl. egy szabályos poliéder komplexitása nulla. A komplexitás értéke jól szemléltethető az illető poliéder és síkokon elfoglalt helyével, pontosabban ezen helyek egymáshoz viszonyított átlós távolságával, amint azt a 2. ábrán is láthatjuk. 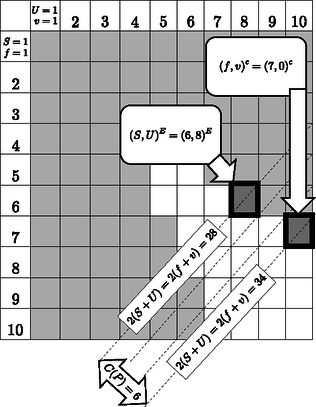 Ha és , akkor a Poincaré‐Hopf-tétel és az Euler-tétel alapján . Minthogy és , az Az és mennyiségek értékeitől függően explicit módon is megadhatjuk értékét, ahol az mennyiség az valós szám értéke felfelé kerekítve egészekre.
Ezen képletek geometriai jelentése a 3. ábrán látható. Mivel minden poliédernek legalább lapja és csúcsa van, ha , akkor legalább akkora, mint az osztály ,,távolsága'' a osztálytól, azaz ,,optimális esetben'' az osztály egy tetraédert tartalmaz, ez a magyarázata a 3. esetben szereplő képletnek. Ha egy poliedrikus pár, akkor ,,optimális esetben'' tartalmaz egy lapú és csúcsú poliédert. Ez felel meg az esetnek. Ha nem poliedrikus pár, mert pl. nagy -hoz képest, azaz és , akkor a legtöbb, amit remélhetünk, hogy találunk az osztályban egy poliédert, melynek lapja van, és a legkevesebb csúcsa, ami egy lapú poliédernek lehet, azaz . Ebből vezethető le az 1. esetben, illetve analóg módon a 2. esetben szereplő képlet. 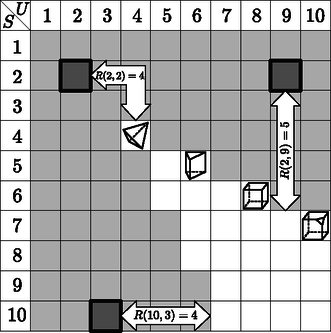 3. ábra. Az függvény értelmezése esetén (az táblázatot néhány poliéder képe illusztrálja, a poliedrikus párokhoz tartozó cellák világos hátterűek). Adott párhoz tartozó érték kiolvasható a táblázatból az mezőnek a legközelebbi fehér mezőtől mért diszkrét távolságaként, lásd a sötétszürke hátterű ( egyensúlyi osztályoknak megfelelő) három példát. Felmerülhet a kérdés, hogy milyen osztályokra teljesülhet a egyenlőség. Ahogy az [5] cikkben láttuk, az , osztályok nem tartalmaznak tetraédert, tehát ezekben az osztályokban biztosan nem igaz az egyenlőség. Az alábbi állítás, melyet Domokos és szerzőtársai [2] igazoltak 2018-ban azt mutatja, hogy az említett egyenlőség az , osztályokban sem teljesül. A fentiek alapján talán meglepő, hogy az alábbi tétel [2] igaz. Ezen tétel egyik speciális eseteként azt kapjuk, hogy ha van lapú és csúcsú poliéder, akkor van lapú és csúcsú olyan poliéder is, melynek minden lapján és csúcsában van egyensúlyi pont. A tétel bizonyítása azzal egyenértékű, hogy minden osztályban konstruálunk egy konvex poliédert, melynek komplexitása éppen . Ezt több lépésben tehetjük meg. A egyenlőtlenségek teljesülése esetén az osztályban számítógép segítségével kereshető alkalmas poliéder: tetraéder, ha , és négyszög alapú gúla, ha vagy . Az , osztályokban közvetlenül, geometriai megfontolások alapján található ezen osztálybeli, lapú és csúcsú poliéder: esetén egy szabályos -szög alaplapú egyenes gúla éppen a megkívánt tulajdonságú. Végül a többi osztályban megfelelő tulajdonságú poliéder a fenti poliéderek apró deformációival kapható meg.   Mi a helyzet az és az osztályokkal? A egyenlőtlenség egy alsó becslést ad értékére. Adható felső becslés is? A válasz a legtöbb osztályra megtalálható a már említett [2] cikkben. Talán érdemes megjegyezni, hogy az ezen tételben szereplő második, azaz a monostabil poliéderekre vonatkozó egyenlőtlenség igazolásához szükséges -osztályú konvex poliéderek a Conway és Guy által konstruált, a [5] cikkben ismertetett monostabil (az osztályba tartozó) poliéder apró deformációival állíthatók elő. A már hivatkozott [2] cikkben szereplő módszerek alkalmazásával konstruálható poliéder a , 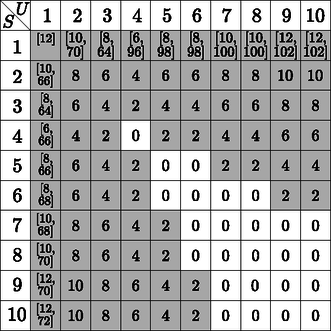 , és az osztályokban is, melyek mindegyike egy-egy felső korlátot ad az osztály komplexitásának mértékére, sőt az egyensúlyi osztályok komplexitásának felső korlátját ugyancsak e és osztályba tartozó két test apró deformációival konstruált testek segítségével kaphatjuk meg. A és egyensúlyi osztályokhoz konstruált poliéder olyan test, amelynek 18 csúcsa van, így tehát a 2. kérdés második felére jelenleg a következő válasz adható: mivel mono-instabil homogén sűrűségű tetraéder nem létezik, a homogén sűrűségű mono-instabil testek minimális csúcsszáma legfeljebb 18, de legalább 5. Az 5. ábra táblázata összefoglalja az egyensúlyi osztályok komplexitásával kapcsolatos legjobb ismert becsléseket. Az 5. ábra alapján az egyetlen osztály, melyről nem tudjuk, hogy tartalmaz-e konvex poliédert, az osztály. Érdemes megjegyezni, hogy általában a konvex testek közt ismert egy olyan homogén test, melynek egy stabil és egy instabil egyensúlyi pontja van. Ez a test, mely a fentiek szerint rendelkezik azzal a tulajdonsággal, hogy (eltekintve az instabil egyensúlyi pontjától), bármilyen helyzetben alátámasztva addig gördül, amíg megtalálja egyetlen stabil egyensúlyi helyzetét, Gömböc néven ismert, és a 6. ábrán látható.  6. ábra Felvetődhet az ötlet, hogy egy Gömböcöt poliéderrel nagyon finoman közelítve kaphatunk egy osztályú konvex poliédert. Sajnos, intuíciónkkal talán ellentétes módon megmutatható, hogy ,,egyenletes'' közelítést használva tetszőleges finomság esetén a keletkező poliédernek egynél több stabil, illetve instabil egyensúlyi pontja lesz. Ezt a jelenséget tárgyalja a [3] cikk. Ösztönözve a kutatást a kis lap- és csúcsszámú, Gömböc-tulajdonságú homogén konvex poliéderek keresésére, a cikket egy nemrég kitűzött díjra való felhívással fejezzük be. Ezen, értékének meghatározásáért kitűzött díj értéke amerikai dollárban:
Domokos Gábor domokos@iit.bme.hu Lángi Zsolt zlangi@math.bme.hu Kovács Flórián kovacs.florian@epito.bme.hu Regős Krisztina regoskriszti@gmail.com Varga Péter Tamás petercobbler@gmail.com |