| Cím: | Fizika Világbajnokság válogató versenyének feladatai | ||
| Füzet: | 2011/április, 233 - 244. oldal |  PDF | MathML PDF | MathML |
|
| Témakör(ök): | Egyéb (KöMaL pontverseny is) | ||
|
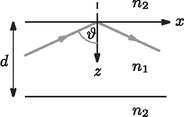
A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre. 1. Számítsuk ki a korongok között ható erőt, ha kicsiny és töltéseket viszünk rájuk. Mivel kicsi, a korongok elmozdulását és a kisülés lehetőségét nem kell figyelembe vennünk. 2. Ezután vizsgáljunk egyetlen korongot. Határozzuk meg a felületi töltéseloszlást egy sugarú, töltésű, magában álló fémkorongon (ez a töltéseloszlás hasznos lehet a következő kérdés megválaszolásához). Ezután mindkét korongot töltéssel látjuk el, majd egy harmadik, cm sugarú, semleges fémkorongot helyezünk a kettő közé egy szigetelő fonálon. A három korong egymással párhuzamos, középpontjaik pedig ugyanazon a vízszintes egyenesen fekszenek (síkjukra merőlegesen nézve tehát koncentrikus köröknek tűnnek). Ezt az állapotot mutatja az 1. ábra. 3. Mekkora a középső korong sugara, ha a két szélső, töltött lemezre ható elektrosztatikus erő nulla? (Az élek hatását hanyagoljuk el a feladatban.) 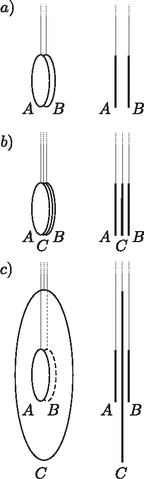 2. feladat. Henger ütközés. Egy tömegű, sugarú üreges henger nyugszik a vízszintes síkon. A henger belsejében egy tömegű, sugarú tömör korong található. Kezdetben a korong középpontja távolságra van a henger középpontjától, és -irányban mozog sebességgel a 2. ábrán látható módon. Ha mást nem kötünk ki, minden ütközés rugalmas, és a súrlódás mindig elhanyagolható. 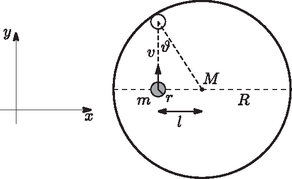 1. Határozzuk meg a korong és a henger sebességének - és -komponenseit közvetlenül az első ütközés után. A választ , , és függvényében adjuk meg. 2. Határozzuk meg a korong és a henger sebességének - és -komponenseit közvetlenül a második ütközés után. A választ , , és függvényében adjuk meg. 3. Ha kezdetben a korong helyzete , határozzuk meg a korong és a henger sebességének - és -komponenseit közvetlenül az -edik ütközés után. 4. Milyen feltételnek kell -re teljesülnie, hogy a korong az -edik ütközés után -irányú sebességgel mozogjon, és az henger nyugalomban maradjon? Határozzuk meg a henger középpontjának két egymást követő nyugalmi helyzete közötti távolságot. 5. Ebben a részben a korong és a henger közötti súrlódás nem hanyagolható el. Az 1. részhez hasonlóan a henger nyugalomban van, a korong középpontja pedig távolságra van a henger középpontjától, és -irányú sebességgel mozog a 2. ábrán látható módon. Feltéve, hogy az ütközés folyamata során az érintkezési pont nem csúszik el, határozzuk meg a korong és a henger szögsebességét közvetlenül az első ütközés után. 1. Teljes visszaverődés. Egy polarizált monokromatikus elektromágneses síkhullám elektromos tere általánosan alakban adható meg, ahol a hullám amplitúdója, a hullámszámvektor és a körfrekvencia. Tegyük fel, hogy egy törésmutatójú közegben körfrekvenciájú monokromatikus síkhullám terjed, ami elér egy törésmutatójú közeget. A bejövő hullám szöget zár be a határfelület beesési merőlegesével. A probléma során csak transzverzálisan polarizált hullámokkal foglalkozunk, azaz olyanokkal, amelyekben az elektromos mező merőleges a beesési síkra. Egyik közeg sem mágneses. 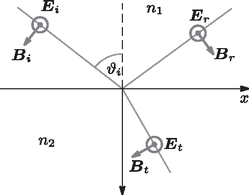 1. Ha , létezik egy határszög, amelyre teljesül, hogy a szög alatt beérkező hullámok teljesen visszaverődnek (total internal reflection: TIR). A visszavert hullám fázisa -val késik a bejövőhöz képest. Vezessük le -t, és adjuk meg , , és függvényében. 2. A szükséges határfeltételek felhasználásával adjuk meg a visszaverődés mértékét esetén. Mutassuk meg, hogy a hullám teljesen visszaverődik minden esetén. 2. Erősítő fáziscsatolás. A legegyszerűbb dielektromos hullámvezető egy vastagságú, törésmutatójú síklemez, amit homogén, törésmutatójú közeg vesz körül (). TIR esetén a lemez felhasználható hullámok veszteség nélküli továbbítására, feltéve, hogy a hullámok interferenciája erősítő, azaz a hullámfrontok megmaradnak a hullám terjedése során a hullámvezetőben. A hullámszámok vákuumban, az és az törésmutatójú közegben rendre , , és . 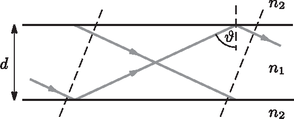 1. Határozzuk meg az erősítő fáziscsatolás szükséges feltételét. 2. A hullámot csak bizonyos értékei esetén lehet veszteségmentesen továbbítani. Mutassuk meg, hogy -nak ki kell elégítenie a következő egyenletet:
ha és . 3. Maxwell-egyenletek. A Maxwell-féle hullámegyenlet egy relatív dielektromos állandójú közegben az elektromos térerősségre:
A 3. ábrán látható hullámvezető lemez esetén , ha , különben pedig . Olyan koordinátarendszerben, amelyben a hullám az -síkban terjed, az elektromos térerősség általánosan
 1. Mi a kapcsolat , és között? 2. A és értéknél felírható határfeltételek felhasználásával vezessük le a hullámvezetés 2. részben megkapott feltételét a Maxwell-egyenletekből. 4. Normál módusok. A normál módusok azon értékeihez kötődnek, amikor a lemezben hullámvezetés történik. Az -hoz (lásd 2. rész) tartozó módus az alapmódus (legalacsonyabb módus, első módus), az -hez tartozó módus a második módus stb. 1. Vázoljunk fel az koordinátarendszerben a (2) és a (3) egyenleteket leíró görbéket. Határozzuk meg annak szükséges feltételét, hogy csak egy normál módus létezzen. 2. Mutassuk meg, hogy a szigetelő lemez által támogatott módusok maximális száma
3. Igazoljuk, hogy a körfrekvencia minden
4. Az (1) egyenlet alapján mutassuk meg, hogy a csoportsebesség () minden támogatott normál módusra
5. Mutassuk meg, hogy az távolság befutásához szükséges idők közötti legnagyobb időkülönbség a különböző módusokban terjedő hullámok esetén
6. Legyen ; ; nm (vákuumban) és . Határozzuk meg az összes módust -re. Ábrázoljuk az elektromos térerősséget ezekre a módusokra. 1. Határozzuk meg a mágneses indukciót a tér minden pontjában. 2. Egy másik dipólust helyezünk az origótól távolságra, ennek helyvektora szöget zár be az -tengellyel. A második dipólus mágneses nyomatéka szöget zár be az -tengellyel. Az elrendezés a 4. ábrán látható. Határozzuk meg a második dipólusra ható forgatónyomatékot. 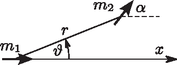 3. Határozzuk meg a két dipólus közti kölcsönhatási energiát. 4. Határozzuk meg a második dipólusra ható erőt. 5. A két dipólust egy elhanyagolható tömegű fonállal összekötjük úgy, hogy a kettő távolsága maradjon. Míg az első dipólus helye és iránya rögzített, a második szabadon mozoghat ( távolságban) az ábra síkjában, és irányítottsága is szabadon változhat. Írjuk fel a második dipólus mozgásegyenletét. A második dipólus tömege és tehetetlenségi nyomatéka rendre és . 6. Kezdetben a második dipólus rögzítve van az -tengelyen, a mágneses nyomatéka szöget zár be az -tengellyel. A második dipólus rögzítését -kor feloldjuk. Írjuk fel a második dipólus mozgásegyenletét, figyelembe véve, hogy és kicsi. Legyen . 7. A rendszer harmonikus rezgést végez. Határozzuk meg a rezgés normál módusainak frekvenciáit. A rendszer normál módusban van, ha a rezgés paraméterei fázisban vannak, azaz így írhatók fel: és . -nak két lehetséges értéke van (jelölje ezeket és ). Határozzuk meg és értékét. 8. Az egyes normál módusokra határozzuk meg és amplitúdóinak hányadosát, -et és -t. 9. A rendszert a következő összefüggések írják le: 1. A hengert függőleges helyzetbe állítjuk állandó nehézségi erőtérben úgy, hogy az csík a csík fölé kerüljön. A csíkot ezután -szer körbeforgatjuk, a két csík közti távolságot értéken tartva. Ezután a csík forgását meggátoljuk egy csavarral, ahogy az 5. ábrán láthatjuk. 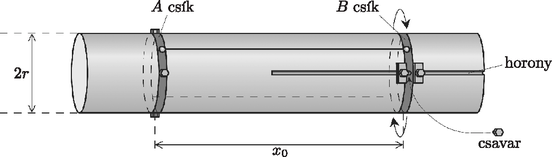 Adjunk meg egy olyan egyenletet, amelyből a paraméterek numerikus értékeinek ismeretében , az új egyensúlyi helyzet meghatározható. Bizonyos feltételek mellett a fémcsík harmonikus rezgést végez. Határozzuk meg a kis amplitúdójú rezgések frekvenciáját , , , és függvényében. 2. A hengert újra vízszintes helyzetbe hozzuk, a köteleket visszaállítjuk eredeti állapotukba, és a forgását megakadályozzuk a csavarral. A csíkra vízszintes feszítőerővel hatunk. Ha az erőt nagyon lassan, fokozatosan növeljük, a kötelek erőnél szakadnak el. Mekkora a legkisebb minimális állandó erő, amely a kötelek elszakításához szükséges? A csíkot a rögzítés előtt -szer körbeforgatjuk, a köteleket nyújtatlanul tartva. Határozzuk meg a kötelek elszakításához szükséges minimális erőt, ha az erőt nagyon lassan növeljük, állandó értéken tartjuk. 3. A rendszer eredeti vízszintes helyzetében van. A csík rögzítését feloldjuk és szöggel elforgatjuk, miközben a két csík távolsága marad, majd elengedjük (kezdetben és ). Írjuk fel a csík mozgásegyenletét. Oldjuk meg a mozgásegyenletet -re és -re. Adjuk meg a maximális sebességet és szögsebességet, valamint a csíkok összeütközéséig eltelő időt. Elfogadható közelítésekkel élve ábrázoljuk a rendszer nyomását a térfogat függvényében a kezdeti térfogat tizedéig, ha az oxigén és a nitrogén anyagmennyiségének aránya 1/9; 2/9; 1/4. Határozzuk meg a nyomás és a térfogat értékét ezen izotermák jellegzetes pontjaiban. A következő adatok állnak rendelkezésünkre: ‐ 1 atm nyomáson a folyékony nitrogén forráspontja: 77,4 K; ‐ 1 atm nyomáson a folyékony oxigén forráspontja: 90,2 K; ‐ az oxigén párolgáshője: 213 J/g. 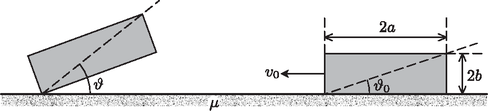 1. Vezessük le a hasáb forgómozgásának egyenletét , , , és függvényében. 2. Adjuk meg azt a feltételt, nevesül értékét, ami lehetővé teszi a fentiek bekövetkezését. A következő kérdésnél feltesszük, hogy a fenti feltétel teljesül. 3. Tekintsünk egy végállapotot, ahol a hasáb nyugalomban marad a 6. ábrán látható helyzetben, miután a tömegközéppontja -szel mozdult el kezdeti helyzetétől. Lehetséges-e egy ilyen végállapot? Ha igen, számítsuk ki az eléréséhez szükséges kezdeti sebességet az alábbi adatokkal: m; m; ; m; . 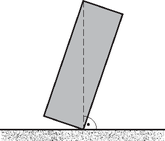 Megjegyzés: , és ismeretében a kezdeti sebesség numerikusan kiszámítható.  2. Ebben a feladatban egy másik, tömegű testet helyezünk a rugó másik végére. Mennyi idő telik el az tömegű test által kiváltott hullámfront -hez való megérkezésétől a rugó és az tömegű test szétválásáig? Számítsuk ki az tömegű test sebességét is, amikor az elhagyja a rugót. Tegyük fel, hogy a rugóban a hullámok terjedési sebessége nagyobb -nál, valamint a rugó elég hosszú ahhoz, hogy az tömegű test leválásakor a visszavert hullámok még ne érjék el az tömegű testet. A bal oldali rugó , a jobb oldali pedig az ellenkező irányba sebességgel halad. A rugók kezdetben nyújtatlanok. -kor a rugók az helyen ütköznek. A rugók egyes pontjainak elmozdulását az függvény írja le, tehát az ütközés után az eredetileg koordinátájú pont a időpontban az koordinátájú pontba kerül. 1. Vezessük le a rugók hullámegyenletét és adjuk meg a rugókban a hullámsebességet. A hullámegyenlet általános megoldása alakú, ahol a hullám terjedési sebessége. A és függvények alakját a határfeltételekből kaphatjuk meg. 2. Írjuk fel a határfeltételeket az , , pontokban. 3. Írjuk fel az függvényt az ütközés előtt (), azaz az és függvényeket. -kor akusztikus hullám indul el mindkét rugóban az ütközési pontból. A rendszer dinamikáját a 8. ábrán látható hely-idő diagramon elemezzük. A vízszintes tengely az időt, a függőleges a rugó pontjainak helyzetét mutatja. A diagram minden vonala egy akusztikus hullámfrontot ábrázol, amelyek mindig akkor indulnak el, amikor egy hullám a határhoz érkezik. 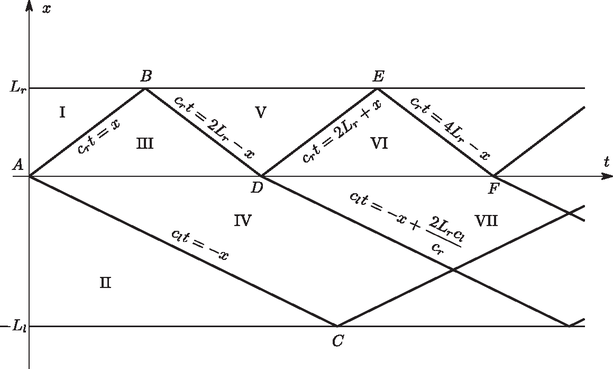 Például az vonal az ütközéskor az pontból kiinduló hullámfront helyzetét ábrázolja az idő függvényében. Írják le az és függvények az ütközéskor rendre a bal, illetve a jobb oldali rugóban elinduló hullámokat, ahol és rendre a bal és a jobb oldali rugókban terjedő hullám sebessége. A hely-idő diagramról látható, hogy a feladatban . Amikor az hullámfront eléri a pontot, egy új visszavert hullám indul visszafelé. Hasonló játszódik le a bal oldali rugóban a pontban. Amikor a jobb oldali rugóban a hullámfront eléri a rugó végét ( pont az ábrán), egy új visszavert és egy új átvitt hullám indul el. Ezek a jelenségek mindig bekövetkeznek, amikor egy hullámfront a két rugó valamelyik határára ér. 4. Írjuk fel az hullámfüggvényt a diagram I, II, III, IV, V, VI és VII jelű tartományaiban , , , , és segítségével. 5. A határfeltétel(ek) felhasználásával határozzuk meg az és függvényeket a rugók paramétereinek és kezdősebességének függvényében. 6. Határozzuk meg az érintkezési pont sebességét közvetlenül az első ütközés után. 7. A határfeltétel(ek) felhasználásával határozzuk meg a függvényt a rugók paramétereinek és kezdősebességének függvényében. Tekintsük azt az esetet, amikor a két rugó a hosszuktól eltekintve egyforma, azaz legyen és . Legyen . 8. Határozzuk meg -t a III és a IV tartományban. Ábrázoljuk -et -nél. A grafikon rajzolásához legyen , és . 9. Határozzuk meg -t az V tartományban. Ábrázoljuk -et -nél, , és az előző feladatban adott értékei mellett. 10. Mikor válik el egymástól a két rugó? Ábrázoljuk -et, , és az előző feladatban adott értékei mellett. 11. Határozzuk meg a rugók ütközésére jellemző ütközési számot. 12. Számítsuk ki a rugók ütközés utáni és előtti összes haladó mozgási energiájának hányadosát. 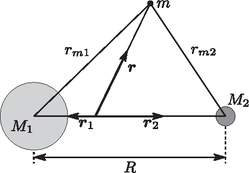 1. A rendszer alapegyenletei Írjuk fel az -re ható eredő gravitációs erő vektorát. Feltéve, hogy , határozzuk meg az ‐ rendszer szögsebességét. A rendszerrel együtt forgó vonatkoztatási rendszerben -re ható tehetetlenségi erők lépnek fel. Írjuk fel az -re ható eredő erő vektorát ebben a vonatkoztatási rendszerben. Tekintsünk egy olyan koordinátarendszert, amelyben a három test az -síkban van, az szögsebesség pedig irányú. Az origót helyezzük az tengelyen elhelyezkedő ‐ rendszer tömegközéppontjába. Írjuk helyzetét alakba. A forgó vonatkoztatási rendszerben írjuk fel az -re ható eredő erőket, ha annak sebessége zérus. Használjuk az és paramétereket. 2. A Lagrange-pontok meghatározása. Öt olyan pont van a vonatkoztatási rendszerben, amelyekben az -re ható eredő erő zérus. Ezek közül három (, , ) az egyenesen (az -tengelyen), míg kettő az -síkon szimmetrikus helyzetben van az -tengely alatt és fölött, azaz . Először , és meghatározását végezzük el. Legyen , ahol jelenti és távolságát egységben. Írjunk fel egy olyan egyenletet, amit ezeknek a pontoknak ki kell elégítenie. Az egyenletet -vel és -val fejezzük ki. Az egyenlet három esetre bomlik (ezek adják az egyes Lagrange-pontokat): , , és . Határozzuk meg és értékét. A továbbiakban feltesszük, hogy kicsi (a Nap-Föld rendszerben ez ). -val csak a legkisebb nem-nulla rendben számolunk, a magasabb rendű tagokat elhanyagoljuk. A következő kérdések segítenek az -tengelyen fekvő Lagrange-pontok meghatározásában. Az első esetben () legyen , ahol egy -tól függő kicsiny pozitív szám. ezen értéke az Lagrange-pont helyzetét alakban adja meg. Határozzuk meg -et függvényében. A második esetben () legyen , ahol egy -tól függő kicsiny pozitív szám. ezen értéke az Lagrange-pont helyzetét alakban adja meg. Határozzuk meg -t függvényében. A harmadik esetben () legyen , ahol egy -tól függő kicsiny pozitív szám. ezen értéke az Lagrange-pont helyzetét alakban adja meg. Határozzuk meg -at függvényében. A negyedik és ötödik Lagrange-pont helyzetének meghatározása összetettebb módszert igényel. Először bontsuk fel az -re ható erőt az vektorral párhuzamos és merőleges komponensre. Adjuk meg az vektorral párhuzamos és a rá merőleges egységvektort az -síkban. Határozzuk meg az -re ható eredő erő -rel párhuzamos és a rá merőleges komponensét. Adjuk meg az -re merőleges irányú egyensúly feltételét. Ennek felhasználásával adjuk meg az és közötti kapcsolatot. Adjuk meg az -rel párhuzamos irányú egyensúly feltételét. Ennek felhasználásával adjuk meg az és közötti kapcsolatot. Határozzuk meg a negyedik és az ötödik Lagrange-pont helyzetét, rendre -et és -öt. 3. A Lagrange-pontok stabilitása. Az egyes Lagrange-pontok stabilitásának ellenőrzésére megzavarjuk -et egyensúlyi helyzetében. Mivel ebben a rendszerben az erők helyétől és sebességétől függnek, a stabilizáló erőket a helyzet és a sebesség különböző változásaira kell kiszámítani. Fejezzük ki az erőt az alábbi módon: Adjuk meg , , , általános alakját. Mutassuk meg, hogy . Számítsuk ki -et, -t, -et, és -t. A fenti nyolc együtthatónak a rugóállandó analógiájára a zavarokat csillapítania kell. Ezek után ellenőrizzük az öt Lagrange-pont stabilitását. -val csak a legkisebb nem-nulla rendben számoljunk, hanyagoljuk el a magasabb rendű tagokat. Az első Lagrange-pont Mutassuk meg, hogy , és határozzuk meg -et. Mutassuk meg, hogy . Mutassuk meg, hogy , és határozzuk meg -t. és () helyettesítésével határozzuk meg -t, kizárólag és függvényében. -nak négy lehetséges értéke van. Adjuk meg azt a feltételt, amit ezeknek a megoldásoknak teljesíteniük kell, hogy stabil legyen, és döntsük el, hogy stabil-e. A Nap‐Föld rendszerre , és /év. Ha ez a pont stabil, adjuk meg a körülötte végezhető rezgés periódusidejét (nap mértékegységben), ha nem stabil, akkor az időállandót (szintén napokban). A második Lagrange-pont Mutassuk meg, hogy , és határozzuk meg -at. Mutassuk meg, hogy . Mutassuk meg, hogy , és határozzuk meg -et. és () helyettesítésével határozzuk meg -t, kizárólag és függvényében. -nak négy lehetséges értéke van. Adjuk meg azt a feltételt, amit ezeknek a megoldásoknak teljesíteniük kell, hogy stabil legyen, és döntsük el, hogy stabil-e. Ha ez a pont a Nap‐Föld rendszerben stabil, adjuk meg a körülötte végezhető rezgés periódusidejét (nap mértékegységben), ha nem stabil, akkor az időállandót (szintén napokban). A harmadik Lagrange-pont hasonló a másodikhoz, tehát nem kell külön foglalkoznunk vele. A negyedik Lagrange-pont Mutassuk meg, hogy , és határozzuk meg -öt. Mutassuk meg, hogy , és határozzuk meg -ot és -et. Mutassuk meg, hogy , és határozzuk meg -at. és () helyettesítésével határozzuk meg -t, kizárólag és függvényében. Legyen . Határozzuk meg azon értéktartományát, amire a negyedik Lagrange-pont stabil. Az ötödik Lagrange-pont azonosan viselkedik, mint a negyedik, így nem kell külön foglalkoznunk vele. 1A versenyről részletes információ található a KöMaL honlapján (lásd Aktuális/WoPhO). A feladatokat angolból fordította: Szabó Attila. A megoldások beküldési határideje: 2011. június 30. |