A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre. Összetett rezgések
I. rész
A középiskolában általában nincs lehetőség a rezgőmozgások mélyebb tárgyalására, legtöbbször csak az egyszerű harmonikus rezgés ismertetésére kerül sor. Ennek oka nem csak az idő szűkében rejlik, hanem abban is, hogy a bonyolultabb összetett rezgések szokásos tárgyalása a középiskolai tananyagon jócskán túlnyúló, lineáris algebrai ismereteket igényel (mátrixok sajátértékproblémája). A környezetünkben túlnyomórészt ezekkel az összetett rezgésekkel találkozunk: a pohár koccanása, a tortazselé remegése, a kristályokban a rácsionok nyüzsgése mind-mind összetett rezgés, amelyek nem érthetők meg pusztán az egyszerű harmonikus rezgőmozgásra vonatkozó ismeretekkel.
Ez a kétrészes cikk kísérletet tesz arra, hogy nehéz matematikai apparátus nélkül, egyszerű példákon keresztül, középiskolások számára is érthető módon tárgyalja az összetett rezgéseket és a témához kapcsolódó olyan érdekes jelenségeket, mint a csatolt ingák rezgése vagy a lebegés.
Az egyszerű harmonikus rezgőmozgás
Elevenítsük fel először a harmonikus rezgésre vonatkozó ismereteket a következő egyszerű példán keresztül!
1. példa. Függőleges falból vízszintesen egy egyenes, hosszú, merev huzal áll ki. A huzalra tömegű gyöngy van felfűzve. A gyöngyöt direkciós erejű húzó-nyomó rugó kapcsolja a falhoz (1. ábra). A kezdetben álló gyöngyöt kezdeti sebességgel elindítjuk. Írjuk le a mozgást! (A gyöngy súrlódásmentesen csúszhat a huzalon.)
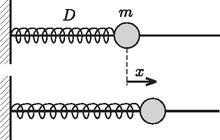 1. ábra
Megoldás. A gyöngyre ható függőleges irányú erők kiegyenlítik egymást, vízszintesen pedig csak a rugóerő hat, így a mechanika alapegyenlete az alakot ölti, ahol a gyöngy egyensúlyi helyzettől mért (időtől függő) kitérése, a gyorsulása, a negatív előjel pedig arra utal, hogy a gyorsulás mindig a kitéréssel ellentétes irányú. Az egyszerűség kedvéért a fizikai mennyiségek változási gyorsaságát jelöljük a fizikai mennyiség fölé írt ponttal, azaz legyen a gyöngy sebessége , a gyorsulása pedig ! A mozgásegyenletet átrendezve az
alakú egyenletre jutunk, ahol bevezettük az jelölést. Az (1) egyenlet egy másodrendű differenciálegyenlet a gyöngy kitérésének időfüggésére, melyet szerencsére nem kell tudnunk megoldani, hiszen a megoldása a jól ismert formát ölti, a gyöngy sebességét pedig a deriválással (vagy a mechanikai energiamegmaradásból) kapható kifejezés adja meg, ahol a rezgés fent bevezetett körfrekvenciája, a rezgés amplitúdója (legnagyobb kitérése), pedig a rezgés kezdőfázisa. Utóbbi kettő a kezdeti feltételektől függ, vagyis a gyöngy kezdeti kitéréséből és sebességéből kiszámítható.
A konkrét példánkban kezdetben a gyöngy az egyensúlyi helyzetben volt (), ezért a kezdőfázis értéke zérus. A kezdősebesség nagysága
volt, így a mozgás amplitúdójának nagysága . A feladatbeli kezdőfeltételek esetén tehát a gyöngyszem mozgását az összefüggés írja le.
Két, rugóval összekötött tömegpont mozgása
Az első példánál egy fokkal bonyolultabb a rugóval összekötött két tömegpont mozgása, amely jól ismert a fizikaversenyekre járók körében. A probléma szokásos megoldási módja a következő: A tömegközéppont egyenletesen haladó mozgását leválasztjuk úgy, hogy beleülünk a tömegközépponttal együtt mozgó koordinátarendszerbe. Itt a rugónak a rendszer tömegközéppontjával egybeeső pontja áll, ezért az egyes testek úgy mozognak, mintha a tömegközéppont által kettéosztott rugó hozzájuk közelebb eső darabja mozgatná őket. Ezzel a gondolattal meghatározható a rezgés körfrekvenciája. Itt azonban egy másik, a bonyolultabb rendszerek esetén is járható utat választunk a megoldáshoz.
2. példa. Egy egyenes, hosszú, vízszintes, merev huzalra és tömegű gyöngyök vannak felfűzve. A gyöngyöket direkciós erejű húzó-nyomó rugó kapcsolja össze (2. ábra). A kezdetben álló rendszert az tömegű gyöngynek adott kezdeti sebességgel elindítjuk. Írjuk le a mozgást! (A gyöngyök súrlódásmentesen csúszhatnak a huzalon.)
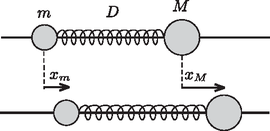 2. ábra
Megoldás. Jelöljük az tömegű gyöngy kezdeti helyzettől mért elmozdulását -mel, az tömegű gyöngy elmozdulását pedig -mel! Az egyes testekre vízszintesen csak a rugóerő hat, így a gyöngyök mozgásegyenletei:
Ezek szembeötlően nem az (1) egyenlethez hasonló kifejezések, azaz a testek mozgása nem egyszerűen harmonikus rezgőmozgás. A további vizsgálódás kedvéért osszuk el az egyenletet a tömegekkel, majd adjuk hozzá az első egyenlethez a második -szorosát (ahol valós szám)! Az eredmény: | | (5) |
Vezessük be az eredeti koordináták lineáris kombinációjaként képzett mennyiséget! A változási gyorsaság képzési szabályából következik, hogy az mennyiség ,,gyorsulása'' a gyöngyök gyorsulásaival hasonlóan egyszerű kapcsolatban van: Az új változó bevezetésével észrevehetjük, hogy az (5) egyenlet vagy esetén alakúra hozható, ahol Tehát a két lehetséges lineárkombináció és a hozzájuk tartozó körfrekvencia:
Az lineárkombináció egy zérus frekvenciájú rezgés egyenletét elégíti ki, vagyis . Ez éppen az egyenletes (tehát nulla gyorsulású) mozgás egyenlete, aminek megoldása ahol -t és -t a kezdeti feltételek határozzák meg. Az lineárkombináció egy körfrekvenciájú harmonikus rezgőmozgás egyenletét elégíti ki, így és időfüggése a (2) és (3) összefüggéseknek megfelelően
ahol az amplitúdót és a kezdőfázist most is a kezdeti feltételek határozzák meg.
Vajon milyen kapcsolatban vannak az és lineárkombinációk az és tömegű gyöngyök mozgásával? Nincs más dolgunk, mint és ismeretében megoldani a (6) egyenletrendszert -re és -re. Így a gyöngyök mozgását leíró egyenletek:
További kérdés, hogy van-e fizikai jelentése az és lineárkombinációknak? A (7) egyenletekből leolvasható, hogy
| ha és , a két test kitérése minden időpillanatban megegyezik, így a testek rezgés nélkül tisztán haladó mozgást végeznek. Az tehát a testek egyenletes haladó mozgását írja le. |
| ha és , a két test kitérése minden időpillanatban ellentétes irányú, nagyságuk pedig fordítottan arányos a gyöngyök tömegével, így ebben az esetben a rendszer tömegközéppontja áll. a gyöngyök egymáshoz viszonyított rezgőmozgását írja le. |
Most térjünk vissza a konkrét példánk megoldásához! Az általános megoldásokat illesztenünk kell a kezdeti feltételekhez. Kezdetben mindkét gyöngy elmozdulása zérus, tehát , azaz a rezgés kezdőfázisa nulla. Az indítás pillanatában az tömegű test sebessége , az tömegű test pedig áll, így és . (6) felhasználásával és adódik. Az és lineárkombinációk időfüggése tehát:
Ezeket beírva a (7) egyenletekbe:
Végül tehát előzetes várakozásainknak megfelelő eredményt kaptunk: a testek olyan összetett mozgást végeznek, melyben a rendszer tömegközéppontja (az impulzusmegmaradás értelmében) sebességgel egyenletesen halad, valamint a testek körfrekvenciával rezegnek a tömegközéppont körül. Ha az tömegarány nagyon kicsi, akkor az tömegű gyöngy lényegében állónak tekinthető és az tömegű test mozgására visszakapjuk az 1. példa eredményeit.
Három, rugóval összekötött tömegpont mozgása
Az előbb megismert módszert alkalmazzuk most három testből és két rugóból álló rendszer rezgéseinek leírására. Legyen a konkrét feladat a következő:
3. példa. Egy egyenes, hosszú, vízszintes, merev huzalra három azonos tömegű gyöngy van felfűzve. A középső gyöngyöt egy-egy direkciós erejű, egyforma húzó-nyomó rugó kapcsolja a két szélsőhöz (3. ábra). A kezdetben álló rendszert a bal szélső gyöngynek adott kezdeti sebességgel elindítjuk. Írjuk le a mozgást! (A gyöngyök súrlódásmentesen csúszhatnak a huzalon.)
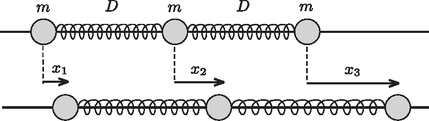 3. ábra
Megoldás. Jelöljük a bal szélső gyöngy elmozdulását -gyel, a középsőét -vel, a jobb szélsőét pedig -mal! Az egyes rugók megnyúlása és , így a három gyöngyre a mozgásegyenletek:
Bevezetve az jelölést és rendezve:
Ezek az egyenletek (akárcsak a két testből álló rendszernél) most sem hasonlítanak a szokásos harmonikus rezgés mozgásegyenletére, de látni fogjuk, hogy az , és koordinátákból megfelelő lineáris kombinációval most is kikeverhető olyan mennyiség (nem is egy, hanem három), melynek időbeli változását a harmonikus rezgés (1) egyenlete írja le. Keressük tehát azokat az és együtthatókat, melyekkel az | | (11) |
módon az eredeti koordinátákból képzett lineáris kombináció időfüggése harmonikus, azaz teljesíti az egyenletet. Ehhez szorozzuk meg a (10) összefüggések közül a másodikat -val, a harmadikat pedig -val, majd adjuk össze az egyenleteket! | |
Rendezve: | |
Látható, hogy ha , akkor az egyenlet jobb oldala eltűnik, azaz a koordináták lineárkombinációja egy körfrekvenciájú alakú ,,rezgési egyenletet'' elégít ki. Ez azt jelenti, hogy az mennyiség az idő függvényében egyenletesen változik, azaz ahol egy sebesség dimenziójú állandó (lényegében a testek kezdősebességeinek összege). Hasonlóan a 2. példa megoldásához, látni fogjuk, hogy ez a lineárkombináció írja le a rendszer tömegközéppontjának mozgását.
A továbbiakban tegyük fel, hogy ! Azért, hogy a (12) egyenlettel azonos alakú időfüggést kapjunk, végezzük el a következő kiemelést: | | (13) |
Innen leolvasható, hogy a harmonikus időfüggés teljesüléséhez az együtthatók között a következő összefüggéseknek kell fennállniuk: | | (14) |
a körfrekvencia pedig (13) szerint
A (14) egyenletrendszer így is írható: Ennek két megoldása van:
A korábban talált mellett megkaptuk tehát az , , koordináták további két olyan lineárkombinációját, amelyek az időben (12) szerint harmonikusan változnak. Tehát a három független lineárkombináció (és a nekik megfelelő rezgési frekvencia) a következő:
Ezek időfüggése pedig:
Az és értéke, az , amplitúdók és a , kezdőfázisok a kezdeti feltételekből (azaz a kiinduló koordinátákból és sebességekből) határozhatók meg. A feladatunk most is az , és kitérés-idő függvények meghatározása. A (16) egyenlet alapján ezek kifejezhetők az ismert időfüggésű , , mennyiségekkel:
A két testből álló rendszerhez hasonlóan könnyen kideríthetjük, hogy mi az () lineárkombinációk fizikai jelentése (4. ábra). A (18) összefüggésből látható, hogy ha
| és , akkor , azaz mindhárom test kitérése megegyezik: ilyenkor a rendszer nem rezeg, ez a lineárkombináció a tisztán haladó mozgást írja le. |
| és , akkor és , vagyis az lineárkombináció olyan ,,lélegző'' mozgásformát ír le, melyben a középső test áll, a két szélső test kitérése pedig minden időpillanatban ellentétes, egyenlő nagyságú. A rendszer tömegközéppontja ilyenkor áll. |
| és , akkor , ami olyan ,,tili-toli'' mozgásformát jelent, hogy a két szélső test kitérése minden időpillanatban megegyezik, a középső pedig velük ellentétesen, kétszer akkora kitéréssel mozog. A tömegközéppont ebben az esetben sem mozog. |
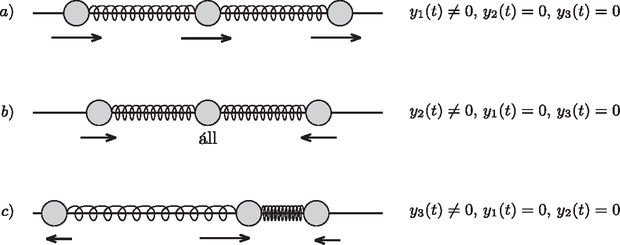 4. ábra. Az () lineárkombinációk fizikai jelentésének szemléltetése: az egyenletes mozgást , a lüktető mozgást , pedig a ,,tili-toli'' mozgást írja le. A rendszer mozgása e három mozgásforma kezdőfeltételektől függő, megfelelő arányú szuperpozíciójaként (keverékeként) állítható elő
Hátra van még a konkrét példánk megoldása, azaz a (18) általános megoldások illesztése a kezdeti feltételekhez. Kezdetben mindhárom test egyensúlyi helyzetben volt, így . Csak a bal oldali testet löktük meg kezdősebességgel, így , . Ezekből és a (16) egyenletekből következik, hogy (azaz ) és . A (17) összefüggéseket figyelembe véve , , . A testek mozgását leíró egyenletek tehát:
Az egyes gyöngyök elmozdulását ábrázolhatjuk az idő függvényében, ahogy azt az 5. ábra mutatja az lineárkombinációk időfüggésével együtt.
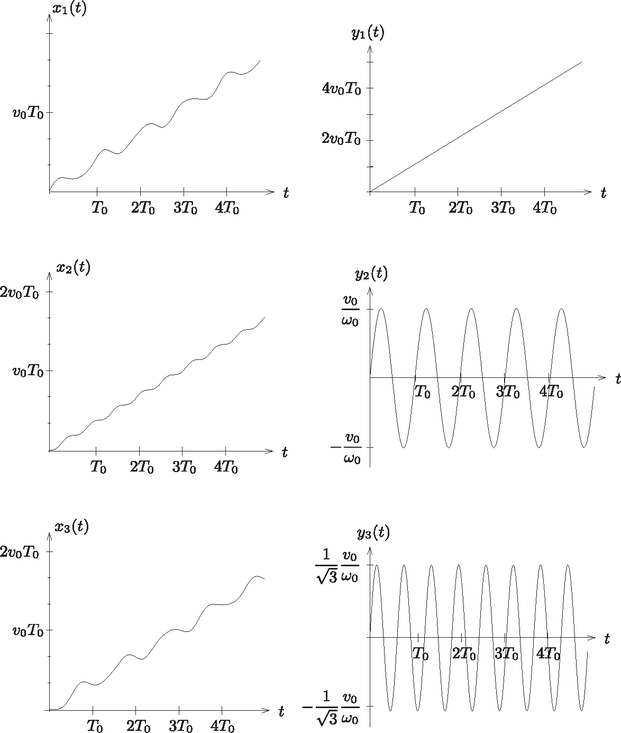 5. ábra. Első oszlop: A három test () kitérése az idő függvényében.
Második oszlop: az kitérésekből képzett lineárkombinációk.
Az időt egységekben mértük
Általános következtetések
Az előzőekben láttuk, hogy a két és három testből álló rendszerek egyenes mentén történő (egydimenziós) rezgéseinél az egyes testek koordinátáinak időfüggését leíró egyenletek általában nem hasonlítanak az egyszerű harmonikus rezgőmozgás egyenletére, de a koordinátákból megfelelő lineárkombináció képzésével előállíthatók olyan mennyiségek, melyek már az időben harmonikusan (egy jellemző körfrekvenciával tisztán szinuszosan) változnak. Az lineárkombinációk pontos időfüggése a rendszer kezdőfeltételeinek (kezdeti kitérések és sebességek) ismeretében meghatározható, majd abból az egyes testek elmozdulásainak értéke is megállapítható.
Az eljárás általánosítható nagyobb rendszerekre is. Álljon a rendszerünk tetszőleges tömegű pontszerű testből, melyek egy egyenes mentén mozoghatnak, és a kössék össze a testeket (akár különböző erősségű) rugók! Ha az -edik test kitérését -vel jelöljük, a rendszer mozgása a következő recepttel írható le:
| 1. | Felírjuk a rendszer összes elemének mozgásegyenletét, azaz minden -re egy alakú egyenletet (itt az együtthatókat a rugók direkciós ereje és a testek tömegei határozzák meg). |
| 2. | Megkeressük azokat az együtthatókat, melyekkel a testek kitéréseiből képzett lineárkombinációk a harmonikus rezgőmozgás egyenletét elégítik ki alkalmas körfrekvenciával. Általában különböző ilyen lineárkombinációt fogunk találni (ahol ). Ezekből egy kombinációhoz mindig zérus körfrekvencia tartozik, ez írja le az egyenletesen haladó mozgást. |
| 3. | Az lineárkombinációkra vonatkozó rezgési egyenleteket megoldjuk és a megoldásokat illesztjük a kezdeti feltételekhez (kezdősebességek és kezdeti koordináták). |
| 4. | Végül az egyes testek koordinátáit kifejezzük az mennyiségekkel. |
Az mennyiségeket, vagy általánosabban fogalmazva a rendszer eredeti koordinátáinak olyan lineárkombinációit, amelyek időfüggése tisztán harmonikus (azaz az időnek egyetlen, adott körfrekvenciájú szinuszos függvényével írható le), normálkoordinátáknak, a nekik megfelelő körfrekvenciákat pedig a rendszer saját(kör)frekvenciáinak nevezzük. Az olyan mozgásformákat, melyekben egyetlen normálkoordináta kivételével mindegyik zérus, sajátrezgésnek vagy normálrezgésnek nevezzük. Például a 3. példában szereplő gyöngyök az egyenletes, a lüktető és a tili-toli mozgásban sajátrezgéseket végeznek. Minden sajátrezgéshez tartozik egy amplitúdó-konfiguráció (a 3. példában a három sajátrezgéshez az amplitúdók , és aránya tartozott), ezeket normálmódusoknak nevezzük.
Idő szerinti deriváltját.Az mennyiségek lineáris kombinációján a alakú összeget értjük, ahol (most) valós számok. |
 PDF | MathML
PDF | MathML