| Cím: | Planar point sets with strong properties of symmetry | ||
| Szerző(k): | Emil Kiss , Gábor Moussong | ||
| Füzet: | 2004/januári melléklet, 2 - 8. oldal |  PDF | MathML PDF | MathML |
|
| Témakör(ök): | Matematika | ||
|
A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre. 1 If any three-element subset of a -element planar point set is axially symmetric, then all the points in the set are collinear. To solve the problem did not prove to be difficult, and an abundance of correct solutions was received. It was clear from the solution of several competitors, that the proposition holds for point sets consisting of much fewer points than 2003. Moreover, someone also made a remark that the point set consisting of the vertices and the centre of a regular pentagon shows that the statement is not true for six-element point sets, and formed a conjecture that it is true for point sets of more than six elements. We are going to prove this proposition by considering the potential point sets and finally mention some possible ways to generalize these. 3-symmetric sets A subset of the plane is called -symmetric, if any three-element subset of it is axially symmetric. These are described by the following theorem:
 Figure
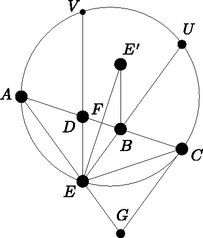
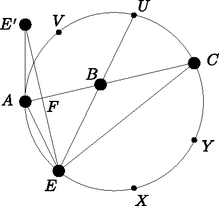 Figure Figures and describe their corresponding configurations. However, it is worth mentioning that in the first figure is configuration , whereas and is configuration , where is the reflection of about . This latter statement holds due to the fact that and are both four vertices of a regular pentagon. First, we are going to examine the case in which contains three collinear points. It is advisable to follow the steps of the proof in the figures above, notations having been kept.
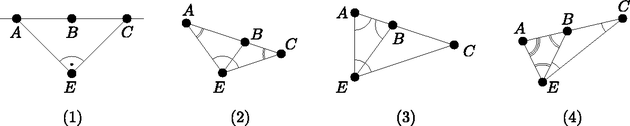 We note that configuration described in and can be found (with the same notation) in figure and respectively, and configuration can also be seen in figure , since and are both of this type. Proof. As the sum of angles and is , it can be assumed (with the possible change of and ) that the angle at in triangle is at least a right angle. By Proposition 1, and . As angle is greater than angles in triangle , . This triangle is isosceles, and therefore or . Let us suppose that . Then angles , , are equal and angle is twice as large (since it is the external angle of triangle ). Thus, the side opposite to vertex in triangle is shorter than the one opposite to vertex . This triangle is isosceles, and therefore either (which yields case ), or (then case is received). If not , but holds, then angles and are going to be equal. This latter one is greater than angle and therefore in triangle . This is also an isosceles triangle, so either (then we get case ), or (this gives case ). The listed angles can easily be calculated in all of the four cases. First, we examine when it is possible to attach two different points on the same side of to points , , . The four configurations in Proposition 2 are determined to the extent of similarity. Therefore, if points , , are given, then point (on the given side of ) is uniquely determined by them. Since Proposition 2 allows swapping and , in principle one can attach two times four points to . However, it is not possible to attach a point to all triplets ; only to those where the ratio is appropriate. This ratio is different in each of the four configurations in Proposition 2. If we are seeking a suitable point to points , then the reciprocal of the above ratio has to be considered. The only possible coincidence is when a configuration of type is attached to one of the triplets or , and a configuration of type is attached to the other one (on the same side of ). This way we get points and , which can be seen in figure ; this is configuration , the only one where there are at least two points on the same side of . Next, we are going to examine what kind of points can be on different sides of the line at the same time. The ratio determines what type of configurations can be constructed upon or upon . Different types can not be confused this time either, except that configuration corresponding to can be added to configuration corresponding to on the other side of the line. This is how in the list of the theorem is obtained ( in figure ). Configurations and in Proposition 2 and configuration in Proposition 3 can be reflected about , yielding cases , , and , respectively. To show that no other configurations exist, we have to prove that if there exists a point in on both sides of the line, there can be at most one on each side, namely that there can be no more points on the other side of configuration . As , , are collinear, propositions stated so far can be applied to these three points instead of (in fact we have swapped with , and with ). Therefore the side of line , which contains and , can not contain any more points. Since the semiplane determined by the perpendicular line erected on at , which contains , contains all configurations received so far, can not have any more points on the plane, indeed. From now on, let be a finite, -symmetric set, which does not have three collinear points. First, we are going to consider the quadrilaterals.
Proof. We are going to use Proposition 1 again. If any of the four points , , , , say is inside triangle , then the sum of the three angles at (, , ) is , and so there can not exist two acute angles among them. But then holds, and we are in case . 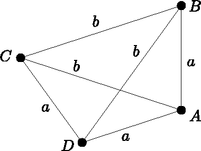 Consequently, we can suppose that is a convex quadrilateral that does not have a vertex which is at equal distance from the other three. As one of the angles of the quadrilateral is at least a right angle, there must be two equal adjacent sides, say . If the quadrilateral is not a rhombus, then e.g. can be assumed, and since three equal sides can not start from , . However, triangle is isosceles, and thus . As three equal sides can not start from either, . One of the sides in triangle is , the other one is , the third one is not , so it can only be , namely . Therefore, in triangle side is also either or , but it can not be , because no three equal segments can start from , either. So . Calculating the angles we receive a regular pentagon. Finally, the last proposition for a rhombus is evident. If the configuration consists of the isosceles triangle and the centre of its circumscribed circle, where , then because of convexity angle must be obtuse, while from it follows that there are acute angles at and . The angle at is not necessarily acute; but this is not a problem, as the quadrilateral is symmetric about . 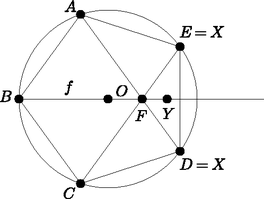 Generalizations The question of what can be said about those planar point sets, all of whose four-element subsets are axially symmetric comes naturally. Or, in general, one can ask, that for a given number which point sets will be -symmetric, which means that any -element subset of them is axially symmetric. Next come some examples of non-collinear, -symmetric sets, that ‐ by arbitrary ‐ can be found by anyone after some investigation. It is plausible that the best way to find such sets is not to keep fixed, but to first require the set to remain axially symmetric after leaving any point off from the set. Let these sets be called one-less-symmetric. It can be easily seen that the following planar point sets are all one-less-symmetric:
It can be noticed that point sets listed in and are also two-less-symmetric, i. e. leaving off any two points, the remaining system is axially symmetric. Are there any more finite, non-collinear, one-less-symmetric point sets in the plane, other than those listed above? It can be proved that actually there are not. We are going to leave the solution of this problem to the reader, adding that there are no more two-less-symmetric sets apart from those listed above, either.
Using these results, a full overview can be obtained on -symmetric point sets of the plane for all . For instance, it easily follows that for , if a -symmetric point set has at least elements, then it is collinear. Eventually, it is an interesting question that relaxing finiteness while looking for one-less- or two-less-symmetric sets, what other examples arise. (Such sets are for example sets comprising all points of a circle or a circular disk, or sets consisting of all points with rational coordinates, and a lot of other examples that can be constructed similarly.) The investigation and description of these sets will also be left to the reader. 1Supported by OTKA T043671.2Supported by OTKA T032478. |