| Cím: | Gondolatok a 2007. évi Eötvös-verseny harmadik feladatával kapcsolatban, avagy mire jó a mátrixoptika? | ||
| Szerző(k): | Pálfalvi László | ||
| Füzet: | 2008/március, 179. oldal |  PDF | MathML PDF | MathML |
|
| Témakör(ök): | Szakmai cikkek, Optikai alapjelenségek | ||
|
A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre. Vannak olyan geometriai optikai feladatok ‐ ilyen a 2007. évi Eötvös-verseny harmadik feladata is ‐ melyeket bizonyos ismeretek birtokában úgy is megoldhatunk, hogy egyetlen fénysugarat sem rajzolunk. A sokszor oly hasznos ‐ bár néha átláthatatlanul bonyolult ‐ rajzok, szerkesztések mellőzését a mátrixoptika módszerének köszönhetjük, mely nem más, mint a fény terjedésének algebrai úton történő leírása. Mindenekelőtt tekintsük át a szükséges matematikai hátteret, majd nézzük meg általánosságban, hogy mi is az a mátrixoptika, végül oldjuk meg az idei Eötvös-verseny feladatát ezzel a módszerrel! Mik is azok a mátrixok? Az alábbiakban szorítkozzunk a kétdimenziós térre, mivel a vizsgált fizikai probléma síkbeli problémára egyszerűsíthető! Vegyünk egy derékszögű koordinátarendszert, és tengelyekkel! Egy vektort a rendezett számpárral adunk meg, ahol és a vektor komponensei. A vektort felírhatjuk oszlopvektorként is: , az alábbiakban ezt a jelölésmódot használjuk. -es mátrixon egy két sorból és két oszlopból álló számtáblázatot értünk, amit alakban adunk meg. Az mátrix és a vektor szorzata az
A mátrixoptikáról Tekintsünk egy lencsékből és tükrökből álló optikai rendszert, melynek elemei úgy vannak elhelyezve, hogy a rendszeren áthaladó tetszőleges fénysugár pályája nem változik (invariáns) az elemeknek egy képzeletbeli közös tengely (optikai tengely) körüli elforgatására. Ha a rendszerre eső fénysugár irányvektora és az optikai tengely egy síkban van, akkor a fénysugár a rendszeren való áthaladás során mindvégig abban a síkban is marad. Koordináta-rendszerünk tengelyét vegyük fel az optikai tengelyen, az tengelyt pedig irányítsuk úgy, hogy fény terjedése az síkban történjen! Mivel a fénysugár az optikai tengelyre merőleges síkot általában egy ponton döfi át, ezért jellemezhetjük itt a fénysugarat az alábbi számpárral: e döféspont koordinátájával és a fénysugár itteni meredekségével, azaz vektorba rendezve az -vel. Ahogy az eddigi optika tanulmányok során tettük, (noha nem mindig hangsúlyoztuk kellőképpen) az alábbiakban is az optikai tengelyhez közeli, azzal kis szöget bezáró (paraxiális) sugarakkal dolgozunk. Az alapcélunk az, hogy ha ismert egy optikai elrendezés geometriája, és ismert a bemeneti síkban a fénysugár optikai tengelytől mért távolsága, illetve meredeksége, akkor ezen jellemzőket megtudhassuk bárhol a rendszerben, azaz ismertté váljon a fénysugár pályája. A mátrixoptika alapja, hogy paraxiális közelítésben egy hagyományos optikai elemekből (lencsék, tükrök, homogén közeg) álló rendszer transzformációja a következő módon írható le:
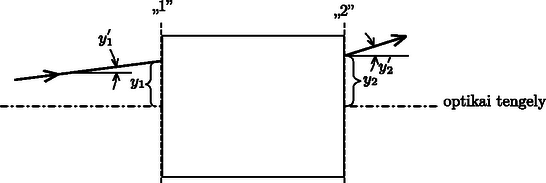 és a rendszert elhagyó fénysugárral Két optikai rendszer akkor tekinthető ekvivalensnek, ha tetszőleges beeső fénysugárral ugyanazt a transzformációt hajtja végre, azaz a két rendszer optikai mátrixa azonos. Nézzük meg néhány elemi rendszer optikai mátrixát! Homogén közeg 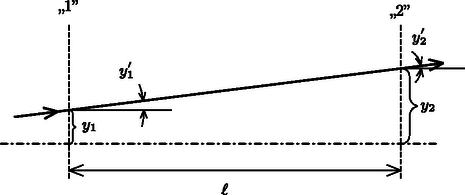 Homogén közegben a fény egyenes vonalban terjed. Ennek megfelelően (2. ábra) az
A gömbtükör 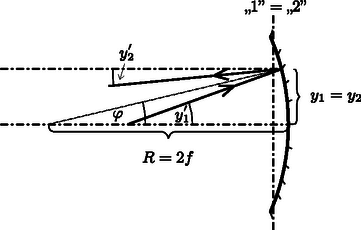 Egy tetszőleges fénysugár gömbtükörről való visszaverődését a 3. ábra illusztrálja. Magától értetődő, hogy
A vékony lencse A levezetést az Olvasóra bízva, fogadjuk el, hogy az fókusztávolságú vékony lencse optikai mátrixa is
Ha optikai rendszerünk több részrendszerből áll, és a fénysugár rendre az ,,1'', ,,2'', , ,,'', , ,,'' rendszereken halad keresztül, az eredő optikai mátrix
A 2007. évi Eötvös-verseny 3. feladatának megoldása optikai mátrixokkal A feladat (ld. a 174. oldalon) sok egymást segítő részfeladatból áll. Az az alapkérdés, hogy egy fókusztávolságú vékony gyűjtőlencse, és egy attól távolságban lévő síktükör helyettesíthető-e egyetlen homorú tükörrel. Ha igen, akkor mekkora a tükör fókusztávolsága, illetve mekkora távolságra kell elhelyezni a tükröt a lencse eredeti helyétől. 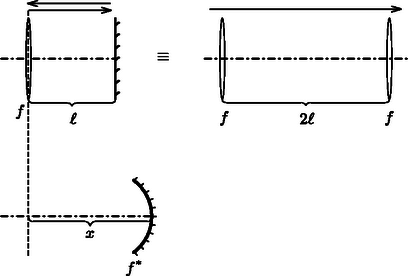 A 4. ábrán látható a lencse-síktükör pár, tőle jobbra (segítségként) a vele ekvivalens kétlencsés séma, az ábra alsó részén pedig a helyettesítő gömbtükrös elrendezés. A lencsés elrendezés(ek)hez tartozó optikai mátrix:
Diszkusszió Diszkutáljuk az eredményt! A (20) és (21) összefüggések nevezői kizárják az esetet, fizikailag ekkor a gömbtükör átmegy síktükörbe, hiszen az határátmenetben a gömbtükör fókusztávolsága -hez tart. Ha , akkor -t, azaz homorú tükröt kapunk, melynek -szel megadott helyére is pozitív szám adódik, azaz az előzetesen feltételezett irányba kell elhelyeznünk. Speciálisan, ha , akkor és adódik. Az esetben , azaz domború tükörrel tudjuk a lencsét helyettesíteni. Mivel ilyenkor adódik, a helyettesítő tükröt a feltételezettel ellentétes irányban (a 4. ábrán illusztrálttal ellentétben a lencsétől balra) kell elhelyeznünk. Végezetül megjegyezzük, hogy az optikai rendszereknél tisztában kell lenni azzal is, hogy mi az a térbeli tartomány, ahol a ,,helyettesítés'' érvényes. A feladat szituációjában esetén (4. ábra) a lencsétől balra eső rész, esetén pedig a lencsétől balra, attól -nél nagyobb távolságra eső tartomány az, ahová a leképezendő tárgyat helyezhetjük. |