| Cím: | A dinamikai példák megoldásáról | ||
| Szerző(k): | Major János | ||
| Füzet: | 1965/február, 84 - 88. oldal |  PDF | MathML PDF | MathML |
|
| Témakör(ök): | Szakmai cikkek | ||
|
A szöveg csak Firefox böngészőben jelenik meg helyesen. Használja a fenti PDF file-ra mutató link-et a letöltésre. A dinamikai példák megoldásáról A mechanikai feladatok között sűrűn fordulnak elő a dinamikai (statikai és kinetikai) példák. Ezeket ‐ a Középiskolai Matematikai Lapok-hoz beérkező dolgozatok tanúsága szerint sokszor nem a legcélszerűbb módon szokták megoldani. Sokan a megoldásnak azt a módját választják, hogy egy erre az esetre alkalmazható ötletes gondolatmenetet felhasználva viszonylag kevés ,,írással'' röviden oldják meg a feladatot. A módszer hátránya, hogy csak az egyszerűbb feladatokra alkalmazható. Az általunk ajánlott módszerrel tetszőlegesen nehéz feladat megoldható néhány alapösszefüggés gépies alkalmazásával, és az esetleg felmerülő nehézségek csak matematikai természetűek lehetnek. A módszert példákon fogjuk bemutatni. Az első csoportba tartoznak a statikai feladatok: merev testek megadott rendszerében keressük a testek között ható erőket. Természetesen a rendszer paraméteresen is megadható, és a paraméter bizonyos értékeit keressük (ilyen lesz az első példa). 1. példa. Súrlódásmentes talajon vízszintes helyzetű hengert rögzítünk. Milyen maximális szöget zárhat be az elég hosszú, nyugalomban levő deszka, ha a henger és a deszka közötti súrlódási együttható (l. az 1. ábrát)? Számítsuk ki a reakcióerőket is! 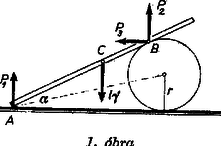 Megoldás. Legyen a deszka hossza , súlya hosszegységenként , a henger sugara . A deszka nyugalomban van, tehát a rá ható erők eredője nulla. Két helyen hat a deszkára reakcióerő: az és a pontban. Az pontban súrlódás nélkül érintkezik a talaj és a deszka vége, vagyis a köztük levő kölcsönhatás csak a talajra merőleges lehet. A deszkára itt a erő hat. A pontban nem ismerjük a kölcsönhatás irányát, ezért két egymásra merőleges és komponensét tekintjük ismeretlennek. A deszkára hat még a súlypontjában az nagyságú súlyerő. Azt, hogy ezen erők eredője nulla, csak vektoregyenlettel lehetne felírni, ehelyett inkább azt írjuk fel, hogy az erők vízszintes és függőleges komponenseinek eredője külön‐külön nulla: Ez két egyenlet, de három ismeretlen van: , és . A hiányzó egyenlet felírásánál azt használjuk fel, hogy a deszkára ható erők forgatónyomatékainak összege bármely pontra nulla. A legegyszerűbb esetet keressük meg: az egyenletet a pontra írjuk fel, ugyanis erre a pontra a és erők nyomatéka nulla ( és , az erők karja és ): A megoldás során kihasználtuk azt, hogy a pont, a deszka súlypontja az és a pont között van, vagyis a deszka nem túl hosszú. Ha ez nem teljesül, akkor a maximális szöget akkor kapjuk, ha a pont egybeesik a ponttal, ugyanis ha a másik oldalára kerül, akkor a deszka átbillen. Ha és egybeesik, akkor , , és teljesül a maximális szögre. A megoldás menete tehát a következő: Az ábrán felrajzoljuk azokat az erőket, amelyek a testekre hatnak (tehát nem az ellenerejüket). Ezután felírjuk mindegyik testre, hogy a rájuk ható vízszintes és függőleges erők eredője nulla. Felírjuk minden egyes testre ‐ tetszőleges pontra ‐ a forgatónyomatékok egyensúlyát. Így annyi egyenletet kapunk, ahány ismeretlen van. (Ha kevesebbet kapnánk, akkor ez azt jelenti, hogy a feladat statikailag határozatlan.) A kapott egyenletrendszert megoldva nyerjük a keresett erőket, és ezzel a feladatot lényegében megoldottuk. Kövessük végig egy másik példa megoldásán ezt a módszert!  2. példa. A 2. ábrán látható elrendezésben a súlyú deszka súrlódásmentesen van megtámasztva két helyen, a felső végén a lecsúszás ellen kötéllel van rögzítve, és az alsó részére támaszkodó súlyú és sugarú hengerre csavart fonál függőlegesen halad felfelé. A henger és a deszka közötti súrlódási együttható elég nagy ahhoz, hogy csúszás ne következzen be. Számítsuk ki a kötélerőket és a két támasznál levő reakcióerőt! Megoldás. Rajzoljuk fel a deszkára ható erőket: a kötél húzza erővel, az első és a második támasz és erővel nyomja a felületre merőlegesen (súrlódás nincs), a súlyerő függőlegesen hat a súlypontban. A henger hatásának irányát nem ismerjük, ezért a és komponenseit rajzoljuk fel. A hengerre ható erők: a deszka hatása éppen ellentétes a hengernek a deszkára gyakorolt hatásával ( és ), a súlyerő függőlegesen hat és a erő kötélirányú. Írjuk fel a deszkára ható erők vízszintes és függőleges komponenseinek összeget: Így már megoldható az egyenletrendszer. A megoldás a következő: A deszka és a henger közötti kölcsönhatás miatt függőleges irányú és nagyságú. Ezzel a feladatot megoldottuk ‐ a látszólag bonyolult példa megoldása során semmilyen nehézség nem lépett fel. A dinamikai feladatok másik csoportjába a kinetikai példák tartoznak. Ezeknél néhány merev test vagy tömegpont, a köztük levő kényszerek (kötél, lejtő stb.) és a rájuk ható erők (gravitációs, súrlódási erők stb.) adottak. Feladat a magára hagyott rendszer mozgásának leírása (általában elég a magára hagyott rendszer gyorsulását kiszámítani). 3. példa. tömegű, hosszúságú hasáb közepén tömegű golyó nyugszik. A nulla időpillanattól kezdve ideig a hasábra állandó húzóerő hat. Ekkor az erőhatás megszűnik. Az alaplap és a hasáb közötti súrlódás elhanyagolható. A golyó és a hasáb közötti csúszó súrlódás biztosítja, hogy a golyó meg ne csússzék, hanem gördüljön. Mekkora idő múlva esik le a hasábról? (Mikor éri el a golyó a hasáb szélét?) A golyó gördülő ellenállása elhanyagolható. (Az 1963. évi középiskolai fizikai tanulmányi verseny II. fordulójának 3. feladata. Megoldással együtt megjelent a Középiskolai Matematikai Lapok 1963. évi 7. számában a 86. oldalon.) Megoldás. Azt mindjárt látjuk, hogy a példa lényegileg megoldottnak tekinthető, ha az egyes gyorsulásokat és a golyó szöggyorsulását kiszámítjuk. Ennek érdekében írjuk fel mindkét testre a mozgásegyenletet! A hasáb gyorsulása legyen , a golyóé ‐ külső koordinátarendszerből nézve. A golyó szöggyorsulása legyen , valamint a golyó és a hasáb közötti kölcsönhatás legyen nagyságú erő. A hasábra ható erők éppen a gyorsítóerőt adják. Hat rá a erő és a golyó hatása: . 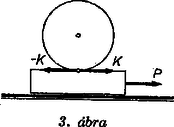 A golyóra csak a erő hat: . Most felírjuk a golyó forgásának egyenletét: a rá ható forgatónyomatékok összege egyenlő a tehetetlenségi nyomaték és a szöggyorsulás szorzatával: , ahol a golyó tehetetlenségi nyomatéka és a golyó sugara. Ez eddig három egyenlet, és az ismeretlenek száma négy. A negyedik egyenletet a kényszerfeltétel adja meg (tehát az, hogy a golyó nem csúszhat a hasábon). Amíg a golyó utat tesz meg és szöggel elfordul, addig a hasáb utat tesz meg, vagyis . Azonban , és , tehát a negyedik egyenlet: . Az egyenletrendszer megoldása: Ezen adatok ismeretében a kérdésre már könnyen válaszolhatunk. A megoldás menete tehát a következő: Minden gyorsuló mozgást végző testre felírjuk az mozgásegyenletet és minden forgó mozgást végző testre a mozgásegyenletet. ( itt forgatónyomatékot jelöl!): Az egyenletrendszer többi egyenletét a kényszerfeltételek megadásával kapjuk meg. Kissé bonyolultabb a helyzet akkor, ha a súrlódást nem hanyagolhatjuk el. Ha csúszó súrlódás van, akkor azt tudjuk, hogy a mozgás sebességével ellentétes irányú súrlódási erő , ahol a súrlódási együttható és a felületeket összenyomó erő. Ilyen feladatok esetén figyelembe kell venni a kezdeti feltételeket is, ugyanis a gyorsulás függ a sebesség irányától. (Például valamely lassuló mozgásnál a súrlódási erő a gyorsulás számértékét növeli, a megállás után, amikor a test már visszafelé mozog, a súrlódási erő irányt változtat és a gyorsulás számértékét csökkenti.) Ha tapadó súrlódás van, akkor a súrlódási erőnek nem ismerjük a nagyságát, csak azt tudjuk róla, hogy kisebb, mint . Ekkor azonban fel tudunk írni egy kényszeregyenletet a felületek tapadására (a 3. példában ez előfordult). Ha olyan példát kapunk, amelyben súrlódás is szerepel, rendszerint azzal a feltevéssel oldjuk meg, hogy kezdetben a rendszer nyugalomban volt. Ekkor először, hogy a súrlódási erők irányát megtudjuk, meghatározzuk a sebességek irányát (a sebesség irányával mindig ellentétes irányú a súrlódási erő). Ez úgy történik, hogy a súrlódás elhanyagolásával felírjuk a mozgásegyenleteket és a kényszeregyenleteket, és megoldjuk azokat. Ha a súrlódás már nem elhanyagolható, akkor legfeljebb csökken a mozgás gyorsulása, illetve sebessége, de az irányukon ez nem változtathat. Miután ismerjük a súrlódási erő irányát (és nagyságát is), felírjuk a végleges egyenletrendszert. Ha ennek megoldása az előző gyorsulással ellentétes irányú gyorsulást ad meg, akkor a helyes megoldás az, hogy a nagy súrlódás miatt a test nem indul meg. (Ha a súrlódási együtthatót növeljük, a lejtőn lecsúszó test nem indul el fölfelé, legfeljebb megáll.) Nézzük meg egy olyan példa megoldását, amelyben csúszó súrlódás szerepel! 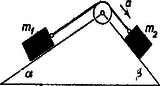 4. példa. A 4. ábrán látható összeállításban a súrlódási együttható , , , , , a kötél ideális, igen jól csúszik a csigán. Számítsuk ki a kötélerőt és a gyorsulást! Megoldás. Vegyük fel a gyorsulás irányát a nyíl szerint. A mozgásegyenletek a súrlódás figyelmen kívül hagyásával: A következő feladatban tapadási súrlódás szerepel. 5. példa. hajlásszögű lejtőn tömegű és sugarú homogén korong gurul le. A súrlódási együttható . Mennyi lesz a korong gyorsulása?  Megoldás. A korongra az és az súrlódási erő hat. Az és a lejtő kényszerereje éppen kiegyenlítik egymást. A mozgásegyenletek: A kényszerfeltétel a tapadás: . Az egyenletrendszer megoldása: Ez azonban csak akkor igaz, ha . Az már nem állhat fenn, ekkor , és a korong csúszni fog. A mozgásegyenletek: Major János (A szerző köszönetet mond Gaál István tud. kutatónak, aki az itt ismertetett eljárás lényeges gondolatait az Ifjúsági Fizikai Kör ülésein több előadásban kifejtette.) |